Today school gave us a tiny robot. It’s intention is to be used in a case with a certain company to achieve a certain goal. The current goal is not yet known.
 she does spin though
she does spin though
Layout
The robot consists of 4 different boards, split on two layers.
The top layer has a raspberry pi, a grove base hat on top that will be used for a bunch of sensors
The bottom layer has a Pololu 32U4 Control board on top of an arduino.
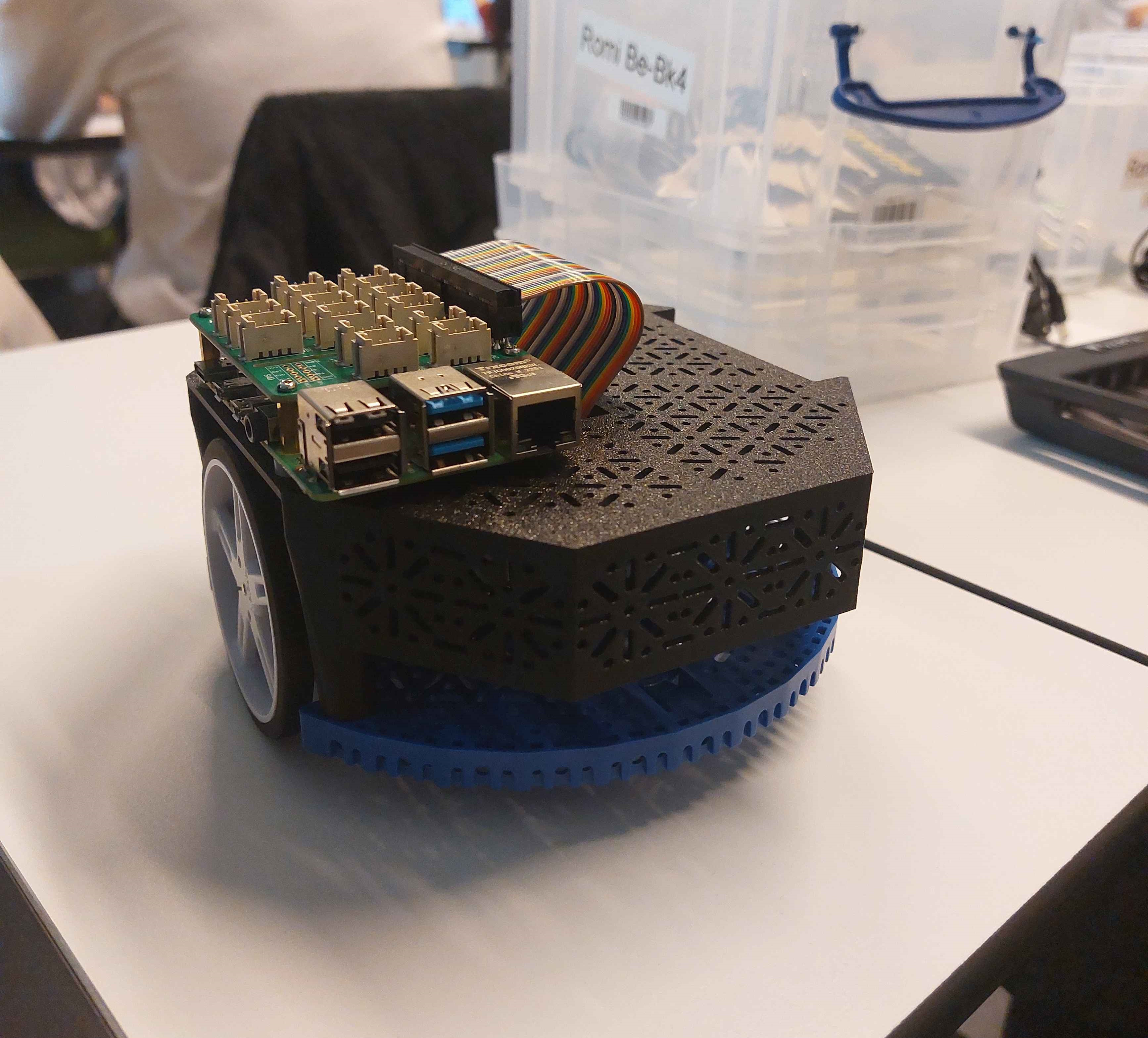
the robot in question
Meet Rebecca :3
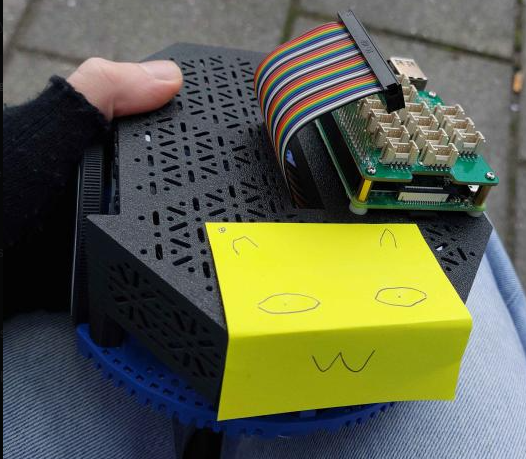
UPDATE:
Becky now looks like this
installing and running the arduino
School had some sheets with how to run the thing, so i just followed those. Firstly, i had to download the arduino IDE software and the romi microcontroller driver, so that the arduino IDE would detect the romi chip in the first place. Then i had to install 3 libraries for code used in the romi (the base chip, gyro/accelerometer and a secret third library).
After this i grabbed an example code from file > examples > Rmoi32U4 and selected the romi board on the right COM port.
Making becky move around
After some messing around, i made her able to drive around and turn once she hits something.

I did this by checking how fast the wheels spin and if they spin about 80% of the normal speed, it probably hit something, and she turns.
She also makes a sound when she hits something, calculated by this function:
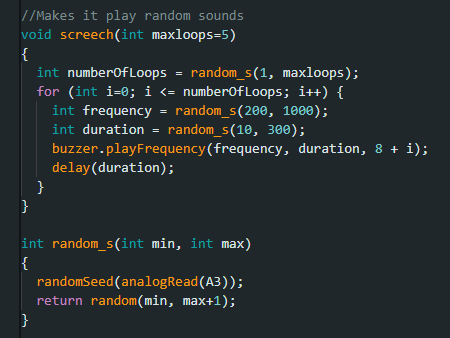 yes, i did name it screech
yes, i did name it screech